മാനിപ്പുലേറ്റർ റോബോട്ട് കൊളാബറേറ്റീവ് Szgh-Arm 2442co മാനിപ്പുലേറ്റർ റോബോട്ട് കൊളാബറേറ്റീവ് ഫോർ ലോഡിംഗ് അൺലോഡിംഗ്



മാനിപ്പുലേറ്റർ റോബോട്ട് കൊളാബറേറ്റീവ് Szgh-Arm 2442co മാനിപ്പുലേറ്റർ റോബോട്ട് കൊളാബറേറ്റീവ് ഫോർ ലോഡിംഗ് അൺലോഡിംഗ്
പ്രധാന വിഭാഗം
വ്യാവസായിക റോബോട്ട് ആം / സഹകരണ റോബോട്ട് ആം / ഇലക്ട്രിക് ഗ്രിപ്പർ / ഇന്റലിജന്റ് ആക്യുവേറ്റർ / ഓട്ടോമേഷൻ സൊല്യൂഷനുകൾ
അപേക്ഷ
SCIC Z-Arm കോബോട്ടുകൾ ഭാരം കുറഞ്ഞ 4-ആക്സിസ് സഹകരണ റോബോട്ടുകളാണ്, അതിനുള്ളിൽ ഡ്രൈവ് മോട്ടോർ നിർമ്മിച്ചിരിക്കുന്നു, മറ്റ് പരമ്പരാഗത സ്കാർ പോലെ റിഡ്യൂസറുകൾ ഇനി ആവശ്യമില്ല, ഇത് ചെലവ് 40% കുറയ്ക്കുന്നു. SCIC Z-Arm കോബോട്ടുകൾക്ക് 3D പ്രിന്റിംഗ്, മെറ്റീരിയൽ കൈകാര്യം ചെയ്യൽ, വെൽഡിംഗ്, ലേസർ കൊത്തുപണി എന്നിവ ഉൾപ്പെടെയുള്ള പ്രവർത്തനങ്ങൾ നടപ്പിലാക്കാൻ കഴിയും, എന്നാൽ അതിൽ മാത്രം പരിമിതപ്പെടുത്താതെ. നിങ്ങളുടെ ജോലിയുടെയും ഉൽപ്പാദനത്തിന്റെയും കാര്യക്ഷമതയും വഴക്കവും വളരെയധികം മെച്ചപ്പെടുത്താൻ ഇതിന് കഴിയും.
ഫീച്ചറുകൾ

ഉയർന്ന കൃത്യത
ആവർത്തനക്ഷമത
±0.02മിമി
വലിയ പേലോഡ്
5 കിലോ
വലിയ കൈ സ്പാൻ
JI അച്ചുതണ്ട് 220mm
J2 അച്ചുതണ്ട് 200mm
മത്സരാധിഷ്ഠിത വില
വ്യാവസായിക നിലവാരം
Cമത്സരാധിഷ്ഠിത വില
ബന്ധപ്പെട്ട ഉല്പന്നങ്ങൾ



സ്പെസിഫിക്കേഷൻ പാരാമീറ്റർ
SCIC Z-Arm 2442B രൂപകൽപ്പന ചെയ്തിരിക്കുന്നത് SCIC ടെക് ആണ്, ഇത് ഭാരം കുറഞ്ഞ സഹകരണ റോബോട്ടാണ്, പ്രോഗ്രാം ചെയ്യാനും ഉപയോഗിക്കാനും എളുപ്പമാണ്, SDK-യെ പിന്തുണയ്ക്കുന്നു. കൂടാതെ, ഇത് കൂട്ടിയിടി കണ്ടെത്തൽ പിന്തുണയ്ക്കുന്നു, അതായത്, മനുഷ്യനെ സ്പർശിക്കുമ്പോൾ അത് യാന്ത്രികമായി നിർത്തും, ഇത് സ്മാർട്ട് മനുഷ്യ-യന്ത്ര സഹകരണമാണ്, സുരക്ഷ ഉയർന്നതാണ്.
| Z-Arm 2442B സഹകരണ റോബോട്ട് ആം | പാരാമീറ്ററുകൾ |
| 1 ആക്സിസ് ഭുജ നീളം | 220 മി.മീ |
| 1 അക്ഷ ഭ്രമണ കോൺ | ±90° |
| 2 ആക്സിസ് ഭുജ നീളം | 200 മി.മീ |
| 2 അക്ഷ ഭ്രമണ കോൺ | ±164° (ഓപ്ഷണൽ: 15-345ഡിഗ്രി) |
| Z ആക്സിസ് സ്ട്രോക്ക് | 240 (ഉയരം ഇഷ്ടാനുസൃതമാക്കാവുന്നതാണ്) |
| R അക്ഷ ഭ്രമണ ശ്രേണി | ±1080° |
| രേഖീയ വേഗത | 1600 മിമി/സെക്കൻഡ് (പേലോഡ് 4 കിലോ) |
| ആവർത്തനക്ഷമത | ±0.02മിമി |
| സ്റ്റാൻഡേർഡ് പേലോഡ് | 4 കിലോ |
| പരമാവധി പേലോഡ് | 5 കിലോ |
| സ്വാതന്ത്ര്യത്തിന്റെ ഡിഗ്രി | 4 |
| വൈദ്യുതി വിതരണം | 220V/110V50-60HZ 48VDC പീക്ക് പവർ 200W-ലേക്ക് പൊരുത്തപ്പെടുന്നു |
| ആശയവിനിമയം | ഇതർനെറ്റ് |
| വികസിപ്പിക്കാവുന്നത് | ബിൽറ്റ്-ഇൻ ഇന്റഗ്രേറ്റഡ് മോഷൻ കൺട്രോളർ 24 I/O + അണ്ടർ-ആം എക്സ്പാൻഷൻ നൽകുന്നു |
| Z- അക്ഷം ഉയരത്തിൽ ഇഷ്ടാനുസൃതമാക്കാം | 0.1മീ-0.5മീ |
| Z-ആക്സിസ് ഡ്രാഗിംഗ് പഠിപ്പിക്കൽ | / |
| ഇലക്ട്രിക്കൽ ഇന്റർഫേസ് റിസർവ്വ് ചെയ്തിരിക്കുന്നു | സ്റ്റാൻഡേർഡ് കോൺഫിഗറേഷൻ: സോക്കറ്റ് പാനലിൽ നിന്ന് ലോവർ ആം കവറിലൂടെ 24*23wg (കവചമില്ലാത്ത) വയറുകൾ ഓപ്ഷണൽ: സോക്കറ്റ് പാനലിലൂടെയും ഫ്ലേഞ്ചിലൂടെയും 2 φ4 വാക്വം ട്യൂബുകൾ |
| അനുയോജ്യമായ HITBOT ഇലക്ട്രിക് ഗ്രിപ്പറുകൾ | ഇ-ഇഎഫ്ജി-8എസ്/ഇസഡ്-ഇഎഫ്ജി-12/ഇസെഡ്-ഇഎഫ്ജി-20/ഇസെഡ്-ഇഎഫ്ജി-20എസ്/ഇസെഡ്-ഇഎഫ്ജി-20എഫ്/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| ശ്വസിക്കുന്ന വെളിച്ചം | / |
| രണ്ടാമത്തെ കൈയുടെ ചലന പരിധി | സ്റ്റാൻഡേർഡ്: ±164° ഓപ്ഷണൽ: 15-345ഡിഗ്രി |
| ഓപ്ഷണൽ ആക്സസറികൾ | / |
| പരിസ്ഥിതി ഉപയോഗിക്കുക | ആംബിയന്റ് താപനില: 0-45°C ഈർപ്പം: 20-80%RH85 (മഞ്ഞുവീഴ്ചയില്ല) |
| I/O പോർട്ട് ഡിജിറ്റൽ ഇൻപുട്ട് (ഐസൊലേറ്റഡ്) | 9+3+ഫോർആം എക്സ്റ്റൻഷൻ (ഓപ്ഷണൽ) |
| I/O പോർട്ട് ഡിജിറ്റൽ ഔട്ട്പുട്ട് (ഐസൊലേറ്റഡ്) | 9+3+ഫോർആം എക്സ്റ്റൻഷൻ (ഓപ്ഷണൽ) |
| I/O പോർട്ട് അനലോഗ് ഇൻപുട്ട് (4-20mA) | / |
| I/O പോർട്ട് അനലോഗ് ഔട്ട്പുട്ട് (4-20mA) | / |
| റോബോട്ട് കൈയുടെ ഉയരം | 683 മി.മീ |
| റോബോട്ട് കൈയുടെ ഭാരം | 240mm സ്ട്രോക്ക് നെറ്റ് ഭാരം 27kg |
| അടിസ്ഥാന വലുപ്പം | 250 മിമി*250 മിമി*15 മിമി |
| അടിസ്ഥാന ഫിക്സിംഗ് ദ്വാരങ്ങൾ തമ്മിലുള്ള ദൂരം | നാല് M8*20 സ്ക്രൂകളുള്ള 200mm*200mm |
| കൂട്ടിയിടി കണ്ടെത്തൽ | √ |
| ഡ്രാഗ് അധ്യാപനം | √ |
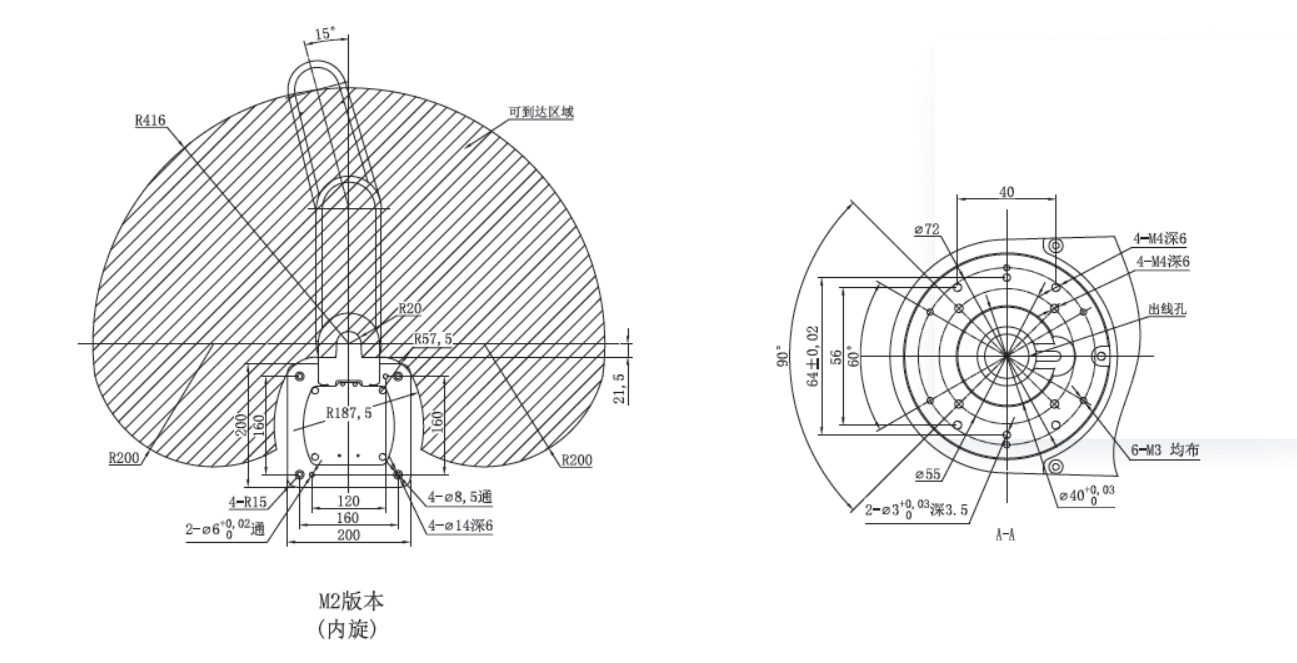
മോഷൻ റേഞ്ച് M1 പതിപ്പ് (പുറത്തേക്ക് തിരിക്കുക)
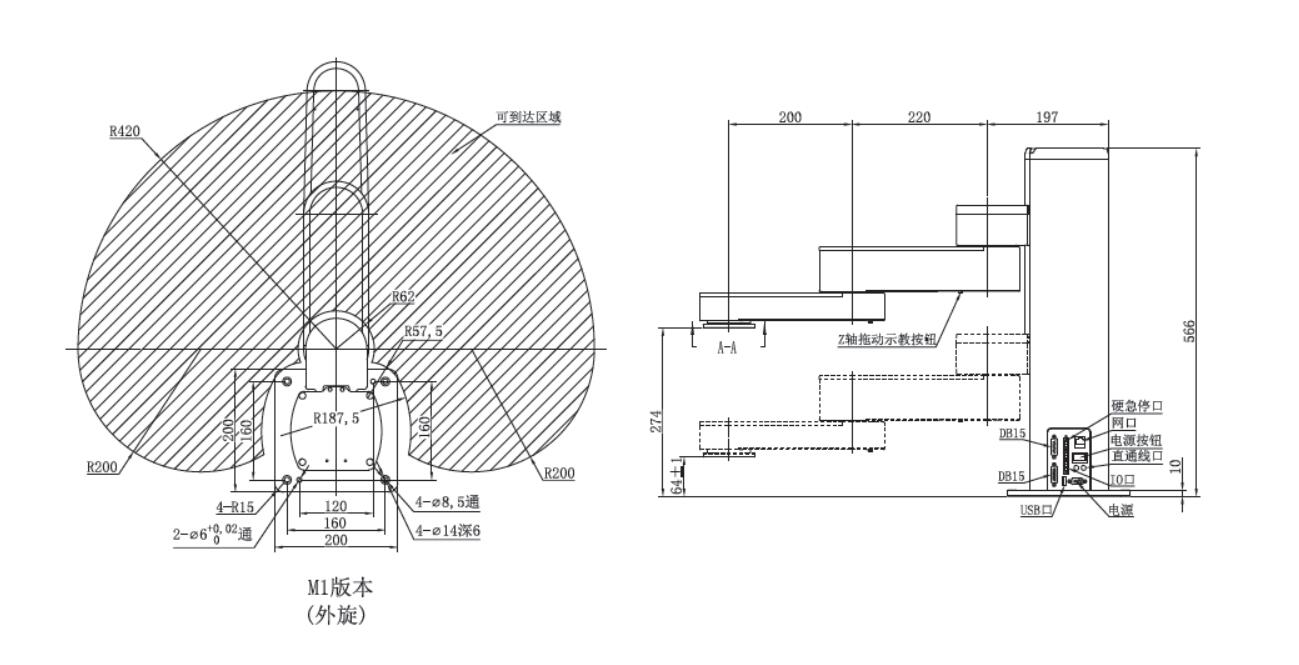
ഇന്റർഫേസ് ആമുഖം

Z-Arm 2442 റോബോട്ട് ആം ഇന്റർഫേസ് 2 സ്ഥലങ്ങളിൽ ഇൻസ്റ്റാൾ ചെയ്തിട്ടുണ്ട്, റോബോട്ട് ആം ബേസിന്റെ വശത്തും (A എന്ന് നിർവചിച്ചിരിക്കുന്നത്) എൻഡ് ആമിന്റെ പിൻഭാഗത്തും. A-യിലെ ഇന്റർഫേസ് പാനലിൽ ഒരു പവർ സ്വിച്ച് ഇന്റർഫേസ് (JI), 24V പവർ സപ്ലൈ ഇന്റർഫേസ് DB2 (J2), ഉപയോക്തൃ I/O പോർട്ട് DB15 (J3)-ലേക്കുള്ള ഔട്ട്പുട്ട്, ഉപയോക്തൃ ഇൻപുട്ട് I/O പോർട്ട് DB15 (J4), IP വിലാസ കോൺഫിഗറേഷൻ ബട്ടണുകൾ (K5) എന്നിവയുണ്ട്. ഇതർനെറ്റ് പോർട്ട് (J6), സിസ്റ്റം ഇൻപുട്ട്/ഔട്ട്പുട്ട് പോർട്ട് (J7), രണ്ട് 4-കോർ സ്ട്രെയിറ്റ്-ത്രൂ വയർ സോക്കറ്റുകൾ J8A, J9A എന്നിവയുണ്ട്.
മുൻകരുതലുകൾ
1. പേലോഡ് ജഡത്വം
പേലോഡിന്റെ ഗുരുത്വാകർഷണ കേന്ദ്രവും Z അച്ചുതണ്ട് ചലന ജഡത്വത്തോടുകൂടിയ ശുപാർശ ചെയ്യപ്പെടുന്ന പേലോഡ് ശ്രേണിയും ചിത്രം 1-ൽ കാണിച്ചിരിക്കുന്നു.

ചിത്രം1 XX32 സീരീസ് പേലോഡ് വിവരണം
2. കൂട്ടിയിടി ശക്തി
തിരശ്ചീന ജോയിന്റ് കൂട്ടിയിടി സംരക്ഷണത്തിന്റെ ട്രിഗർ ഫോഴ്സ്: XX42 ശ്രേണിയുടെ ബലം 40N ആണ്.
3. Z- അക്ഷത്തിന്റെ ബാഹ്യശക്തി
Z അച്ചുതണ്ടിന്റെ ബാഹ്യബലം 120N കവിയാൻ പാടില്ല.

ചിത്രം 2
4. ഇഷ്ടാനുസൃതമാക്കിയ Z അച്ചുതണ്ട് സ്ഥാപിക്കുന്നതിനുള്ള കുറിപ്പുകൾ, വിശദാംശങ്ങൾക്ക് ചിത്രം 3 കാണുക.

ചിത്രം 3
മുന്നറിയിപ്പ് കുറിപ്പ്:
(1) വലിയ സ്ട്രോക്കുള്ള ഇഷ്ടാനുസൃതമാക്കിയ Z-ആക്സിസിന്, സ്ട്രോക്ക് വർദ്ധിക്കുന്നതിനനുസരിച്ച് Z-ആക്സിസ് കാഠിന്യം കുറയുന്നു. Z-ആക്സിസ് സ്ട്രോക്ക് ശുപാർശ ചെയ്യുന്ന മൂല്യം കവിയുമ്പോൾ, ഉപയോക്താവിന് കാഠിന്യം ആവശ്യകതയുണ്ട്, കൂടാതെ വേഗത പരമാവധി വേഗതയുടെ 50% ത്തിൽ കൂടുതലാണെങ്കിൽ, ഉയർന്ന വേഗതയിൽ റോബോട്ട് ഭുജത്തിന്റെ കാഠിന്യം ആവശ്യകത നിറവേറ്റുന്നുണ്ടെന്ന് ഉറപ്പാക്കാൻ Z-ആക്സിസിന് പിന്നിൽ ഒരു പിന്തുണ സ്ഥാപിക്കാൻ ശക്തമായി ശുപാർശ ചെയ്യുന്നു.
ശുപാർശ ചെയ്യുന്ന മൂല്യം ഇപ്രകാരമാണ്: Z-ArmXX42 സീരീസ് Z-ആക്സിസ് സ്ട്രോക്ക് >600mm
(2) Z-ആക്സിസ് സ്ട്രോക്ക് വർദ്ധിപ്പിച്ചതിനുശേഷം, Z-ആക്സിസിന്റെയും ബേസിന്റെയും ലംബത വളരെയധികം കുറയും. Z-ആക്സിസിനും ബേസ് റഫറൻസിനും കർശനമായ ലംബത ആവശ്യകതകൾ ബാധകമല്ലെങ്കിൽ, ദയവായി സാങ്കേതിക ഉദ്യോഗസ്ഥരെ പ്രത്യേകം സമീപിക്കുക.
5. പവർ കേബിൾ ഹോട്ട്-പ്ലഗ്ഗിംഗ് നിരോധിച്ചിരിക്കുന്നു. വൈദ്യുതി വിതരണത്തിന്റെ പോസിറ്റീവ്, നെഗറ്റീവ് പോളുകൾ വിച്ഛേദിക്കപ്പെടുമ്പോൾ റിവേഴ്സ് മുന്നറിയിപ്പ്.
6. പവർ ഓഫ് ആയിരിക്കുമ്പോൾ തിരശ്ചീന ഭുജം അമർത്തരുത്.

ചിത്രം 4
DB15 കണക്റ്റർ ശുപാർശ

ചിത്രം 5
ശുപാർശ ചെയ്യുന്ന മോഡൽ: ABS ഷെല്ലുള്ള സ്വർണ്ണം പൂശിയ പുരുഷൻ YL-SCD-15M ABS ഷെല്ലുള്ള സ്വർണ്ണം പൂശിയ സ്ത്രീ YL-SCD-15F
വലിപ്പ വിവരണം: 55mm*43mm*16mm
(ചിത്രം 5 കാണുക)
റോബോട്ട് ആം കോംപാറ്റിബിൾ ഗ്രിപ്പേഴ്സ് ടേബിൾ
| റോബോട്ട് ആം മോഡൽ നമ്പർ. | അനുയോജ്യമായ ഗ്രിപ്പറുകൾ |
| എക്സ് എക്സ് 42 ടി 1 | Z-EFG-8S NK/Z-EFG-12 NK/Z-EFG-20 NM NMA/Z-EFG-20S/ Z-EFG-30NM NMA അഞ്ചാമത്തെ അച്ചുതണ്ട് 3D പ്രിന്റിംഗ് |
| എക്സ് എക്സ് 42 ടി 2 | Z-EFG-50 ALL/Z-EFG-100 TXA |
പവർ അഡാപ്റ്റർ ഇൻസ്റ്റലേഷൻ വലുപ്പ ഡയഗ്രം
XX42 കോൺഫിഗറേഷൻ 24V 500W RSP-500-SPEC-CN പവർ സപ്ലൈ

റോബോട്ട് കൈയുടെ ബാഹ്യ ഉപയോഗ പരിസ്ഥിതിയുടെ ഡയഗ്രം

ഞങ്ങളുടെ ബിസിനസ്സ്


ഉൽപ്പന്ന വിഭാഗങ്ങൾ
-

മെഗ്മീറ്റ് എഹാവെയ്ക്കൊപ്പം സാമ്പത്തിക 6 ആക്സിസ് റോബോട്ട് ആം ...
-

6 ആക്സിസ് മൾട്ടി-സ്റ്റേഷൻ ഗ്രിപ്പർ ഹാൻഡ്ലിംഗ് സ്കാര റോബ്...
-
മികച്ച വില 6 ആക്സിസ് റോബോട്ട് ആം മെഷീൻ വെൽഡിംഗ് റോബ്...
-

ഇന്റലിജന്റ് 6 ആക്സിസ് സിഎൻസി റോബോട്ട് ആം / മെക്കാനിക്കൽ ആർ...
-

ഓട്ടോമാറ്റിക് റോബോട്ട് വെൽഡിംഗ് ഉപകരണങ്ങൾ വെൽഡർ ഇൻഡസ്റ്റ്...
-
ഹോട്ട് സെയിൽ റോബോട്ട് ആം മെറ്റൽ 6-ആക്സിസ് മെക്കാനിക്കൽ റോബോ...